WELCOME TO THE NEW PLATFORM FOR THE OPENSIM DOCUMENTATION
Remember to update your bookmarks with our new URL.
If you find missing content or broken links, let us know: opensim@stanford.edu
Tutorial 3 - Scaling, Inverse Kinematics, and Inverse Dynamics
- Jennifer Hicks
- Henry Kwong
- stingjp
The tutorial below is designed for use with OpenSim version 4.0 and later. A version of the tutorial compatible with OpenSim version 3.3 is available here.
I. Objectives
Purpose
The purpose of this tutorial is to demonstrate how OpenSim solves an inverse kinematics and dynamics problem using experimental data. To diagnose movement disorders and study human movement, biomechanists frequently ask human subjects to perform movements in a motion capture laboratory and use computational tools to analyze these movements. A common step in analyzing a movement is to compute the joint angles and joint moments of the subject during movement. OpenSim has tools for computing these quantities:
- Inverse kinematics is used to compute joint angles.
- Inverse dynamics is used to compute net joint reaction forces and net joint moments.
Inverse kinematics computes the joint angles for a musculoskeletal model that best reproduce the motion of a subject. Inverse dynamics then use joint angles, angular velocities, and angular accelerations of the model, together with the experimental ground reaction forces and moments, to solve for the net reaction forces and net moments at each of the joints. The schematic below shows an overview of the inverse kinematics and inverse dynamics problems. 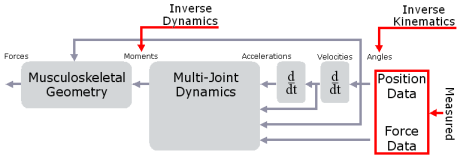
In this tutorial, you will:
- Become familiar with OpenSim's Scale, Inverse Kinematics and Inverse Dynamics tools
- Solve an inverse kinematics and inverse dynamics problem using experimental data
- Interpret the results of the inverse dynamics solution
- Investigate the dynamic inconsistencies that arise during inverse dynamics
Format
Each section of the tutorial guides you in using certain tools within and asks you to answer a few questions. The menu titles and option names you must select and any commands you must type to run OpenSim will appear in boldface. The questions can be answered based on information from OpenSim and basic knowledge of the human musculoskeletal system. After you complete the tutorial, feel free to explore OpenSim and the other analysis tools further on your own. Depending on the amount of exploration you do, this tutorial should take 1-2 hours to complete.
II. Generic Musculoskeletal Model
In this tutorial, you will be using a generic musculoskeletal model with 23 degrees of freedom and actuated by 54 muscles entitled 3DGaitModel2354. To load the generic musculoskeletal model into OpenSim:
| 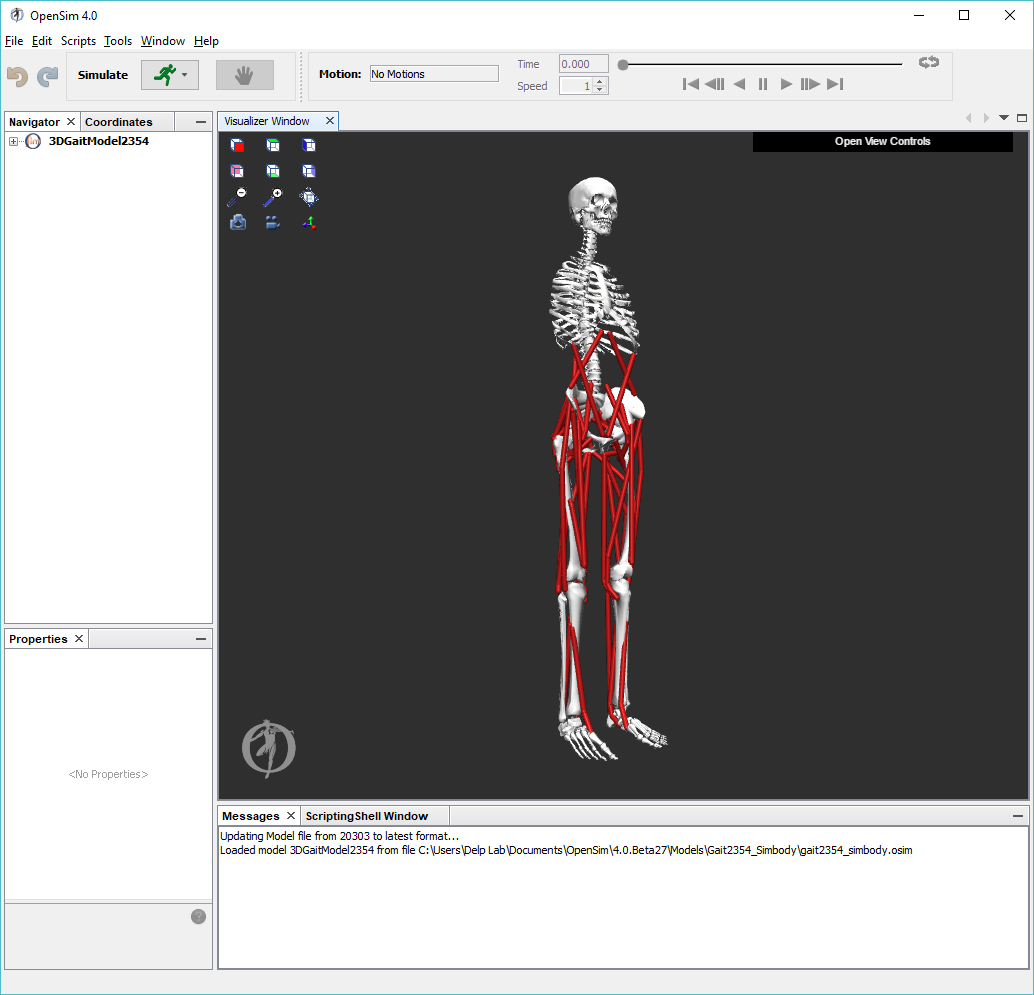 |
III. Scaling A Musculoskeletal Model
Subject-specific modeling involves (i) scaling a generic musculoskeletal model to modify the anthropometry, or physical dimensions, of the generic model so that it matches the anthropometry of a particular subject and (ii) registering the markers placed on the model to match the locations on the subject. Scaling and Registration are the most important steps in solving inverse kinematics and inverse dynamics problems because IK and ID solutions are sensitive to the accuracy of the scaling and registration. To scale the generic model and register the markers:
This Scale Setup file is an xml file that contains pre-configured settings to scale and register the generic gait2354 musculoskeletal model to the dimensions of a subject that we have experimental data for. A detailed explanation of the Scale Tool can be found on the Scaling page of the documentation. | 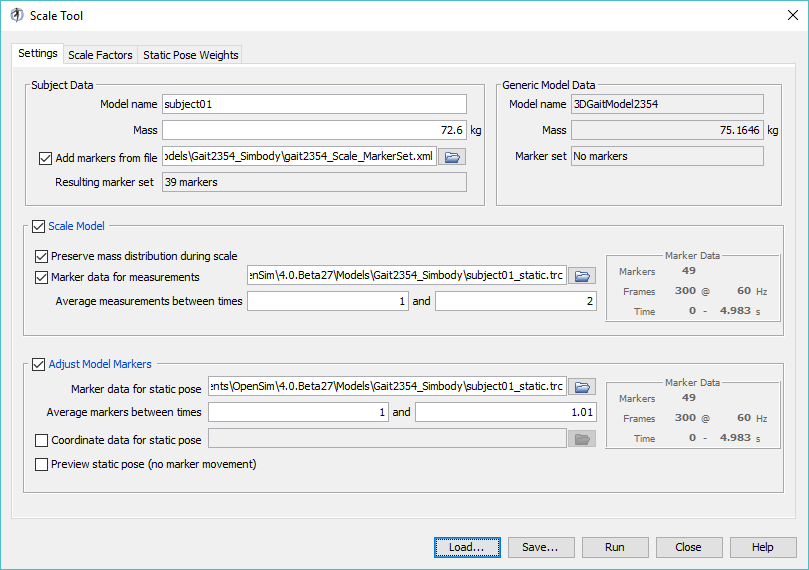 |
Model ScalingIn OpenSim, the scaling step adjusts both the dimensions of the body segments, as well as the mass properties (mass and inertia tensor). Scaling can be performed using a combination of two methods: (1) Manual Scaling: Scaling that allows the user to scale a segment based on some predetermined scale factor. Manual scaling is sometimes necessary when suitable data are not available, or if the scale factors were determined using an alternative algorithm. (2) Measurement-based Scaling: Scaling that determines scale factors for a body segment by comparing distance measurements between specified landmarks on the model, known as model markers, and the corresponding experimental marker positions. Marker RegistrationIn OpenSim, the registration step adjusts the location of model markers to match the location of markers on the subject. To do this, you must first estimate a pose for the model that closely resembles the pose of the subject during the experimental static trial. | 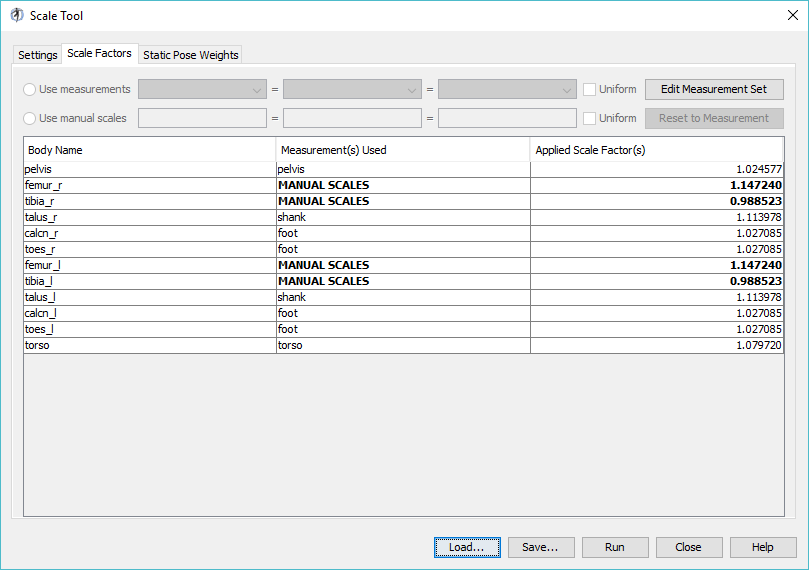 |
To complete the scale step:
| 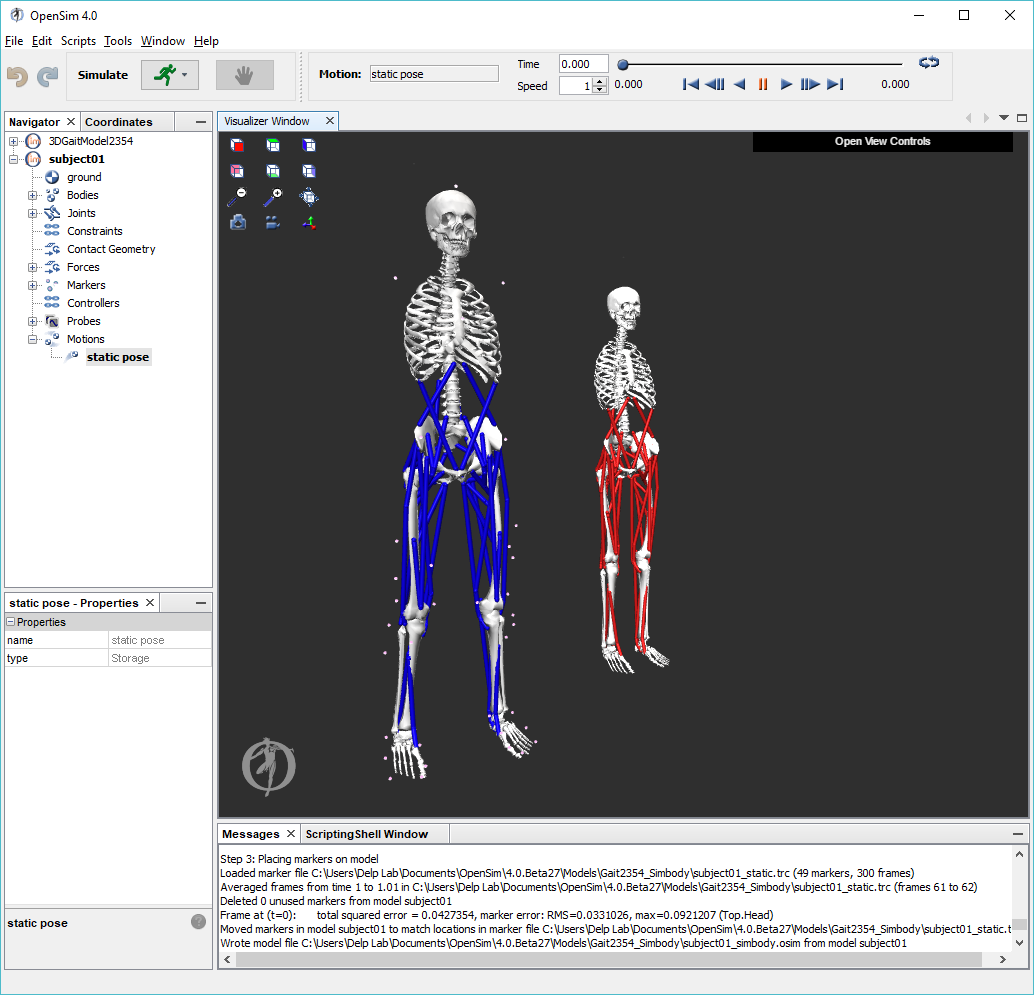 |
Questions
1. Based on information in the Scale Tool dialog, what is the mass of the generic musculoskeletal model? What was the mass of the subject?
2. What frequency was the experimental motion data captured?
Hint: Look for the box titled Marker Data.
3. Click on the Scale Factors tab. Which body segments were scaled manually?
IV. Inverse Kinematics
Kinematics is the study of motion without considering the forces and moments that produce that motion. The purpose of inverse kinematics (IK) is to estimate the joint angles of a particular subject from experimental data. In this section, you will estimate a subject's joint angles during walking by performing an IK analysis using the subject scaled model and experimentally collected walking data.
For each time step of recorded motion data, IK computes a set of joint angles that put the model in a configuration that "best matches" the experimental kinematics. OpenSim determines this "best match" by solving a weighted least squares optimization problem with the goal of minimizing marker error. Marker error is defined as the distance between an experimental marker and the corresponding model marker. Each marker has an associated weighting value, specifying how strongly that marker's error term should be minimized in the least squares problem. For each time step, the inverse kinematics tool solves for a vector of generalized coordinates (e.g., joint angles), q, that minimizes the weighted sum of marker errors, which is expressed as
 %5cright%5c%7c%5e2 %5cright%5d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMAIN-6D' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q351 442 364 440T387 434T406 426T421 417T432 406T441 395T448 384T452 374T455 366L457 361L460 365Q463 369 466 373T475 384T488 397T503 410T523 422T546 432T572 439T603 442Q729 442 740 329Q741 322 741 190V104Q741 66 743 59T754 49Q775 46 803 46H819V0H811L788 1Q764 2 737 2T699 3Q596 3 587 0H579V46H595Q656 46 656 62Q657 64 657 200Q656 335 655 343Q649 371 635 385T611 402T585 404Q540 404 506 370Q479 343 472 315T464 232V168V108Q464 78 465 68T468 55T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-69' d='M69 609Q69 637 87 653T131 669Q154 667 171 652T188 609Q188 579 171 564T129 549Q104 549 87 564T69 609ZM247 0Q232 3 143 3Q132 3 106 3T56 1L34 0H26V46H42Q70 46 91 49Q100 53 102 60T104 102V205V293Q104 345 102 359T88 378Q74 385 41 385H30V408Q30 431 32 431L42 432Q52 433 70 434T106 436Q123 437 142 438T171 441T182 442H185V62Q190 52 197 50T232 46H255V0H247Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-71' d='M33 157Q33 258 109 349T280 441Q340 441 372 389Q373 390 377 395T388 406T404 418Q438 442 450 442Q454 442 457 439T460 434Q460 425 391 149Q320 -135 320 -139Q320 -147 365 -148H390Q396 -156 396 -157T393 -175Q389 -188 383 -194H370Q339 -192 262 -192Q234 -192 211 -192T174 -192T157 -193Q143 -193 143 -185Q143 -182 145 -170Q149 -154 152 -151T172 -148Q220 -148 230 -141Q238 -136 258 -53T279 32Q279 33 272 29Q224 -10 172 -10Q117 -10 75 30T33 157ZM352 326Q329 405 277 405Q242 405 210 374T160 293Q131 214 119 129Q119 126 119 118T118 106Q118 61 136 44T179 26Q233 26 290 98L298 109L352 326Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-5B' d='M118 -250V750H255V710H158V-210H255V-250H118Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-2211' d='M60 948Q63 950 665 950H1267L1325 815Q1384 677 1388 669H1348L1341 683Q1320 724 1285 761Q1235 809 1174 838T1033 881T882 898T699 902H574H543H251L259 891Q722 258 724 252Q725 250 724 246Q721 243 460 -56L196 -356Q196 -357 407 -357Q459 -357 548 -357T676 -358Q812 -358 896 -353T1063 -332T1204 -283T1307 -196Q1328 -170 1348 -124H1388Q1388 -125 1381 -145T1356 -210T1325 -294L1267 -449L666 -450Q64 -450 61 -448Q55 -446 55 -439Q55 -437 57 -433L590 177Q590 178 557 222T452 366T322 544L56 909L55 924Q55 945 60 948Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-69' d='M184 600Q184 624 203 642T247 661Q265 661 277 649T290 619Q290 596 270 577T226 557Q211 557 198 567T184 600ZM21 287Q21 295 30 318T54 369T98 420T158 442Q197 442 223 419T250 357Q250 340 236 301T196 196T154 83Q149 61 149 51Q149 26 166 26Q175 26 185 29T208 43T235 78T260 137Q263 149 265 151T282 153Q302 153 302 143Q302 135 293 112T268 61T223 11T161 -11Q129 -11 102 10T74 74Q74 91 79 106T122 220Q160 321 166 341T173 380Q173 404 156 404H154Q124 404 99 371T61 287Q60 286 59 284T58 281T56 279T53 278T49 278T41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2208' d='M84 250Q84 372 166 450T360 539Q361 539 377 539T419 540T469 540H568Q583 532 583 520Q583 511 570 501L466 500Q355 499 329 494Q280 482 242 458T183 409T147 354T129 306T124 272V270H568Q583 262 583 250T568 230H124V228Q124 207 134 177T167 112T231 48T328 7Q355 1 466 0H570Q583 -10 583 -20Q583 -32 568 -40H471Q464 -40 446 -40T417 -41Q262 -41 172 45Q84 127 84 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-72' d='M36 46H50Q89 46 97 60V68Q97 77 97 91T98 122T98 161T98 203Q98 234 98 269T98 328L97 351Q94 370 83 376T38 385H20V408Q20 431 22 431L32 432Q42 433 60 434T96 436Q112 437 131 438T160 441T171 442H174V373Q213 441 271 441H277Q322 441 343 419T364 373Q364 352 351 337T313 322Q288 322 276 338T263 372Q263 381 265 388T270 400T273 405Q271 407 250 401Q234 393 226 386Q179 341 179 207V154Q179 141 179 127T179 101T180 81T180 66V61Q181 59 183 57T188 54T193 51T200 49T207 48T216 47T225 47T235 46T245 46H276V0H267Q249 3 140 3Q37 3 28 0H20V46H36Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6B' d='M36 46H50Q89 46 97 60V68Q97 77 97 91T97 124T98 167T98 217T98 272T98 329Q98 366 98 407T98 482T98 542T97 586T97 603Q94 622 83 628T38 637H20V660Q20 683 22 683L32 684Q42 685 61 686T98 688Q115 689 135 690T165 693T176 694H179V463L180 233L240 287Q300 341 304 347Q310 356 310 364Q310 383 289 385H284V431H293Q308 428 412 428Q475 428 484 431H489V385H476Q407 380 360 341Q286 278 286 274Q286 273 349 181T420 79Q434 60 451 53T500 46H511V0H505Q496 3 418 3Q322 3 307 0H299V46H306Q330 48 330 65Q330 72 326 79Q323 84 276 153T228 222L176 176V120V84Q176 65 178 59T189 49Q210 46 238 46H254V0H246Q231 3 137 3T28 0H20V46H36Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-65' d='M28 218Q28 273 48 318T98 391T163 433T229 448Q282 448 320 430T378 380T406 316T415 245Q415 238 408 231H126V216Q126 68 226 36Q246 30 270 30Q312 30 342 62Q359 79 369 104L379 128Q382 131 395 131H398Q415 131 415 121Q415 117 412 108Q393 53 349 21T250 -11Q155 -11 92 58T28 218ZM333 275Q322 403 238 411H236Q228 411 220 410T195 402T166 381T143 340T127 274V267H333V275Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-73' d='M295 316Q295 356 268 385T190 414Q154 414 128 401Q98 382 98 349Q97 344 98 336T114 312T157 287Q175 282 201 278T245 269T277 256Q294 248 310 236T342 195T359 133Q359 71 321 31T198 -10H190Q138 -10 94 26L86 19L77 10Q71 4 65 -1L54 -11H46H42Q39 -11 33 -5V74V132Q33 153 35 157T45 162H54Q66 162 70 158T75 146T82 119T101 77Q136 26 198 26Q295 26 295 104Q295 133 277 151Q257 175 194 187T111 210Q75 227 54 256T33 318Q33 357 50 384T93 424T143 442T187 447H198Q238 447 268 432L283 424L292 431Q302 440 314 448H322H326Q329 448 335 442V310L329 304H301Q295 310 295 316Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-77' d='M580 385Q580 406 599 424T641 443Q659 443 674 425T690 368Q690 339 671 253Q656 197 644 161T609 80T554 12T482 -11Q438 -11 404 5T355 48Q354 47 352 44Q311 -11 252 -11Q226 -11 202 -5T155 14T118 53T104 116Q104 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Q21 293 29 315T52 366T96 418T161 441Q204 441 227 416T250 358Q250 340 217 250T184 111Q184 65 205 46T258 26Q301 26 334 87L339 96V119Q339 122 339 128T340 136T341 143T342 152T345 165T348 182T354 206T362 238T373 281Q402 395 406 404Q419 431 449 431Q468 431 475 421T483 402Q483 389 454 274T422 142Q420 131 420 107V100Q420 85 423 71T442 42T487 26Q558 26 600 148Q609 171 620 213T632 273Q632 306 619 325T593 357T580 385Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2225' d='M133 736Q138 750 153 750Q164 750 170 739Q172 735 172 250T170 -239Q164 -250 152 -250Q144 -250 138 -244L137 -243Q133 -241 133 -179T132 250Q132 731 133 736ZM329 739Q334 750 346 750Q353 750 361 744L362 743Q366 741 366 679T367 250T367 -178T362 -243L361 -244Q355 -250 347 -250Q335 -250 329 -239Q327 -235 327 250T329 739Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAINB-78' d='M227 0Q212 3 121 3Q40 3 28 0H21V62H117L245 213L109 382H26V444H34Q49 441 143 441Q247 441 265 444H274V382H246L281 339Q315 297 316 297Q320 297 354 341L389 382H352V444H360Q375 441 466 441Q547 441 559 444H566V382H471L355 246L504 63L545 62H586V0H578Q563 3 469 3Q365 3 347 0H338V62H366Q366 63 326 112T285 163L198 63L217 62H235V0H227Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-78' d='M201 0Q189 3 102 3Q26 3 17 0H11V46H25Q48 47 67 52T96 61T121 78T139 96T160 122T180 150L226 210L168 288Q159 301 149 315T133 336T122 351T113 363T107 370T100 376T94 379T88 381T80 383Q74 383 44 385H16V431H23Q59 429 126 429Q219 429 229 431H237V385Q201 381 201 369Q201 367 211 353T239 315T268 274L272 270L297 304Q329 345 329 358Q329 364 327 369T322 376T317 380T310 384L307 385H302V431H309Q324 428 408 428Q487 428 493 431H499V385H492Q443 385 411 368Q394 360 377 341T312 257L296 236L358 151Q424 61 429 57T446 50Q464 46 499 46H516V0H510H502Q494 1 482 1T457 2T432 2T414 3Q403 3 377 3T327 1L304 0H295V46H298Q309 46 320 51T331 63Q331 65 291 120L250 175Q249 174 219 133T185 88Q181 83 181 74Q181 63 188 55T206 46Q208 46 208 23V0H201Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-70' d='M36 -148H50Q89 -148 97 -134V-126Q97 -119 97 -107T97 -77T98 -38T98 6T98 55T98 106Q98 140 98 177T98 243T98 296T97 335T97 351Q94 370 83 376T38 385H20V408Q20 431 22 431L32 432Q42 433 61 434T98 436Q115 437 135 438T165 441T176 442H179V416L180 390L188 397Q247 441 326 441Q407 441 464 377T522 216Q522 115 457 52T310 -11Q242 -11 190 33L182 40V-45V-101Q182 -128 184 -134T195 -145Q216 -148 244 -148H260V-194H252L228 -193Q205 -192 178 -192T140 -191Q37 -191 28 -194H20V-148H36ZM424 218Q424 292 390 347T305 402Q234 402 182 337V98Q222 26 294 26Q345 26 384 80T424 218Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2212' d='M84 237T84 250T98 270H679Q694 262 694 250T679 230H98Q84 237 84 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAINB-71' d='M38 220Q38 273 54 314T95 380T152 421T211 443T264 449Q368 449 429 386L438 377L484 450H540V-132H609V-194H600Q582 -191 475 -191Q360 -191 351 -194H342V-132H411V42Q409 41 399 34T383 25T367 16T347 7T324 1T296 -4T264 -6Q162 -6 100 56T38 220ZM287 46Q368 46 417 127V301L412 312Q398 347 369 371T302 395Q282 395 263 388T225 362T194 308T182 221Q182 126 214 86T287 46Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-5D' d='M22 710V750H159V-250H22V-210H119V710H22Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ4-5B' d='M269 -1249V1750H577V1677H342V-1176H577V-1249H269Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ4-5D' d='M5 1677V1750H313V-1249H5V-1176H240V1677H5Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-6D'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-69' x='833' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='1112' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-71' x='949' y='-850'%3e%3c/use%3e %3cg transform='translate(1835%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ4-5B'%3e%3c/use%3e %3cg transform='translate(583%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ2-2211' x='868' y='0'%3e%3c/use%3e %3cg transform='translate(0%2c-1110)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-69' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2208' x='345' y='0'%3e%3c/use%3e %3cg transform='translate(716%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6D' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='833' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-72' x='1334' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6B' x='1726' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-65' x='2255' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-72' x='2699' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-73' x='3091' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cg transform='translate(3931%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-77' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-69' x='1013' y='-213'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(4992%2c0)'%3e %3cg transform='translate(0%2c812)'%3e %3cuse xlink:href='%23E1-MJMAIN-2225' x='0' y='-751'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2225' x='0' y='-874'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(500%2c0)'%3e %3cuse xlink:href='%23E1-MJMAINB-78' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(607%2c482)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-65' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-78' x='444' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-70' x='972' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-69' x='859' y='-430'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2212' x='2511' y='0'%3e%3c/use%3e %3cg transform='translate(3512%2c0)'%3e %3cuse xlink:href='%23E1-MJMAINB-78' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-69' x='859' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='4464' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAINB-71' x='4853' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='5463' y='0'%3e%3c/use%3e %3cg transform='translate(5852%2c812)'%3e %3cuse xlink:href='%23E1-MJMAIN-2225' x='0' y='-751'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2225' x='0' y='-874'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='8984' y='762'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJSZ4-5D' x='11799' y='-1'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
|
where q is the vector of generalized coordinates (e.g., joint angles), xiexp is the position of experimental marker i, xi(q) is the position of the corresponding model marker i (which depends on q), and wi is the weight associated with marker i.
To set up an inverse kinematics analysis:
subject01_Setup_IK.xml contains pre-configured settings for the inverse kinematics tool. Notice the text boxes in the dialog window are now filled with values. A detailed explanation of the Inverse Kinematics Tool can be found on the Inverse Kinematics page of the documentation. | 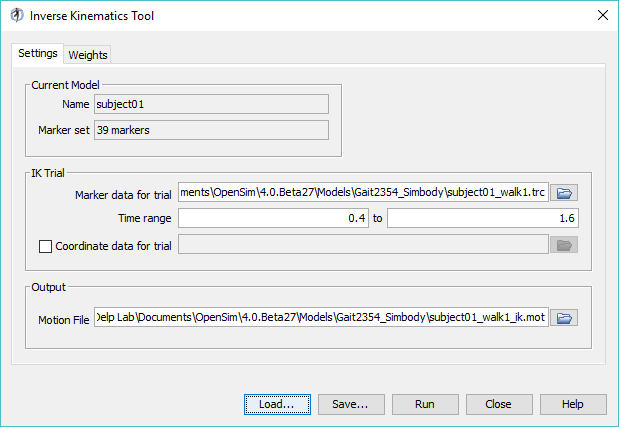 |
Navigate to the Weights tab.
| 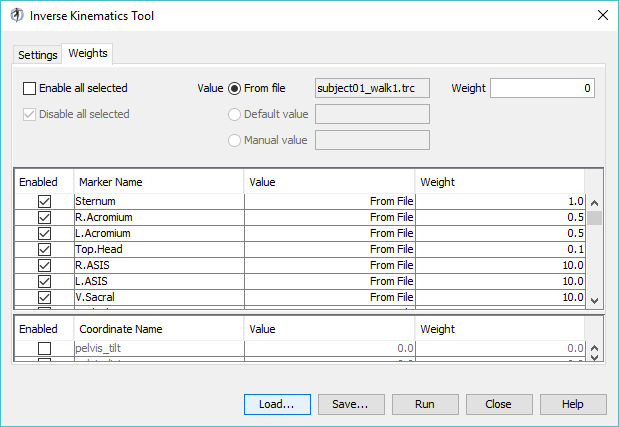 |
To perform inverse kinematics:
| 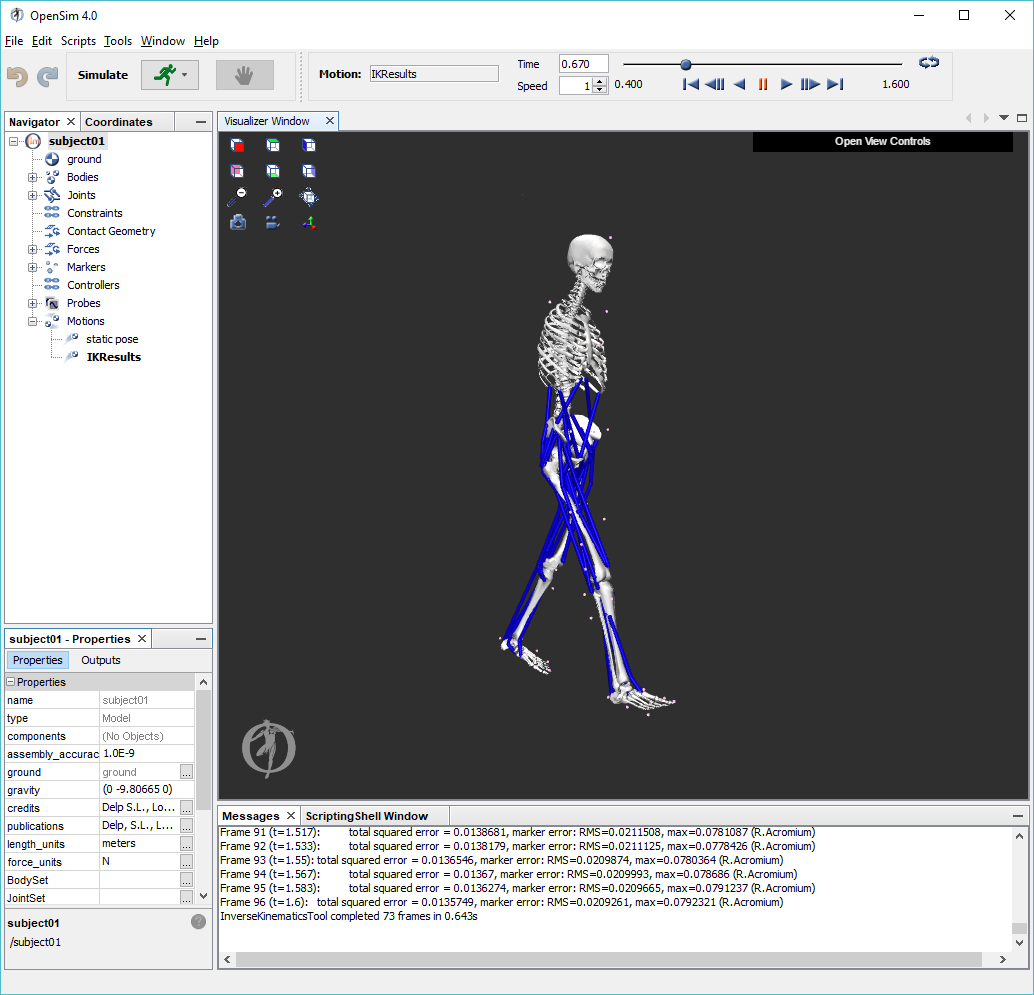 |
Questions
4. In the Inverse Kinematics Tool dialog window, click the Weights tab and scroll through the list of markers in the top half of the weights tab. Which markers have weighting values less than one? Why?
Hint: Think about joints that have not been modeled.
5. Based on information in the Messages window, what is the root-mean-squared (RMS) error of all the markers in the last frame of the motion? Include units. Does this seem reasonable? Explain.
6. What was the value of the maximum marker error in the last frame? Include units. Which marker had this maximum error, and why?
Hint: Think about the weighted least squares problem.
V. Inverse Dynamics
Dynamics is the study of motion and the forces and moments that produce that motion. To perform inverse dynamics, estimation of mass and inertia is required. The purpose of inverse dynamics is to estimate the forces and moments that cause a particular motion, and its results can be used to infer how muscles are utilized in that motion. To determine these forces and moments, equations of motion for the system are solved iteratively [3]. The equations of motion are derived using the kinematic description and mass properties of a musculoskeletal model. Then, using the joint angles from inverse kinematics and experimental ground reaction force data, the net reaction forces and net moments at each of the joints are calculated such that the dynamic equilibrium conditions and boundary conditions are satisfied [3].
To setup an inverse dynamics analysis:
A detailed explanation of the Inverse Dynamics Tool can be found on the Inverse Dynamics page of the documentation. | 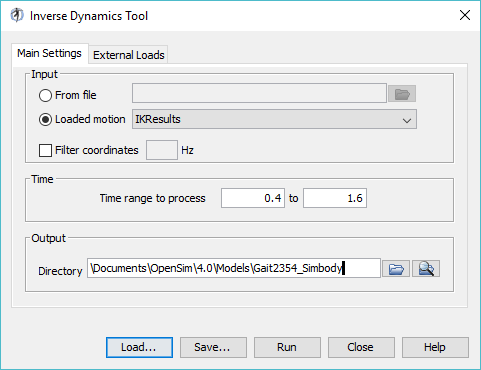 |
To perform inverse dynamics:
|  |
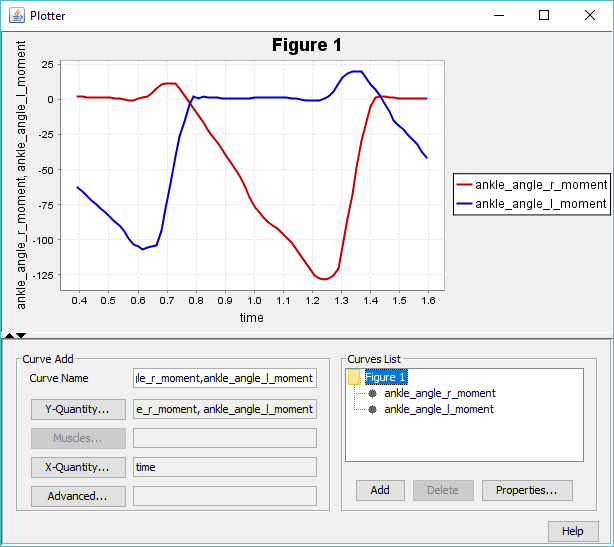
When completed, examine the results of the inverse dynamics solution by plotting the net moments at the left and right ankles:
|  |
In solving the inverse dynamics problem, both kinematic data and force plate data were used, making this an over-determined problem. In other words, the problem has more equations than unknowns (i.e., degrees of freedom). Due to errors in the experimental motion data and inaccuracies in the musculoskeletal model, it turns out that Newton's second law is violated, or
† An analogous equation relates the ground reaction moment, In this musculoskeletal model, the residuals are applied to the pelvis segment. To see the residuals from the inverse dynamics solution, in a new plot window, Plot pelvis_tx_force, pelvis_ty_force, and pelvis_tz_force versus time. Using this plot, answer question 9. While applying residual forces and moments makes the model's motion dynamically consistent with the external forces | 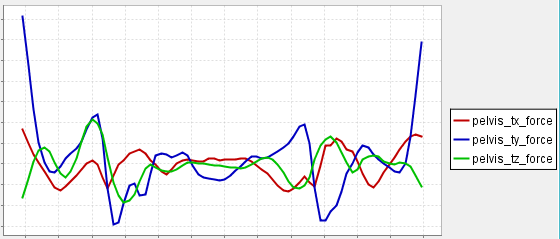 |


Questions
7. On your plot of the ankle moments, identify when heel strike, stance phase, toe off, and swing phase occur for each curve (i.e., left leg and right leg).
8. Based on your plot and the angle convention for the ankle, give an explanation of what is happening at the ankle just before toe-off.
Hint: It may be useful to use the Coordinate sliders to understand the angle convention for the ankle.
9. What are the maximum magnitudes of the residual forces? Using the mass of the subject from Question 1, what fraction of body weight are the maximum residual forces?
Acknowledgments
The experimental gait data were collected by Jill Higginson and Chand John in the Neuromuscular Biomechanics Lab at the University of Delaware [8]. The data include marker trajectories and ground reaction forces for an adult male walking at a self-selected speed on an instrumented split-belt treadmill. Please note that the data distributed with OpenSim is from a different subject than the one described in the paper. Data collection protocols were the same for both subjects.
References
1. Delp, S.L., Loan, J.P., Hoy, M.G., Zajac, F.E., Topp E.L., Rosen, J.M. An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures. IEEE Transactions on Biomedical Engineering, vol. 37, pp. 757-767, 1990.
2. Anderson, F.C., Pandy, M.G. A dynamic optimization solution for vertical jumping in three dimensions. Computer Methods in Biomechanical and Biomedical Engineering, vol. 2, pp. 201-231, 1999.
3. Kuo, A.D. A least squares estimation approach to improving the precision of inverse dynamics computations, Journal of Biomechanical Engineering, vol. 120, pp. 148-159, 1998.
4. Winter, D.A. Biomechanics and Motor Control of Human Movement, Wiley and Sons, pp. 77-79, 1990.
5. Thelen, D.G., Anderson, F.C. Using computed muscle control to generate forward dynamic simulations of human walking from experimental data, Journal of Biomechanics, vol. 39, pp. 1107-1115, 2006.
6. John, C.T., Anderson, F.C., Guendelman, E., Arnold, A.S., Delp, S.L. An algorithm for generating muscle-actuated simulations of long-duration movements, Biomedical Computation at Stanford (BCATS) Symposium, Stanford University, 21 October 2006, Poster Presentation.
7. Delp, S.L., Anderson, F.C., Arnold, A.S., Loan, P., Habib, A., John, C.T., Guendelman, E., Thelen, D.G. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Transactions on Biomedical Engineering, vol. 55, pp. 1940-1950, 2007.
8. Chand T. John, Frank C. Anderson, Jill S. Higginson & Scott L. Delp (2012): Stabilisation of walking by intrinsic muscle properties revealed in a three-dimensional muscle-driven simulation, Computer Methods in Biomechanics and Biomedical Engineering.
OpenSim is supported by the Mobilize Center , an NIH Biomedical Technology Resource Center (grant P41 EB027060); the Restore Center , an NIH-funded Medical Rehabilitation Research Resource Network Center (grant P2C HD101913); and the Wu Tsai Human Performance Alliance through the Joe and Clara Tsai Foundation. See the People page for a list of the many people who have contributed to the OpenSim project over the years. ©2010-2024 OpenSim. All rights reserved.